

BRASS SWARM
Shanghai, installation,
2015
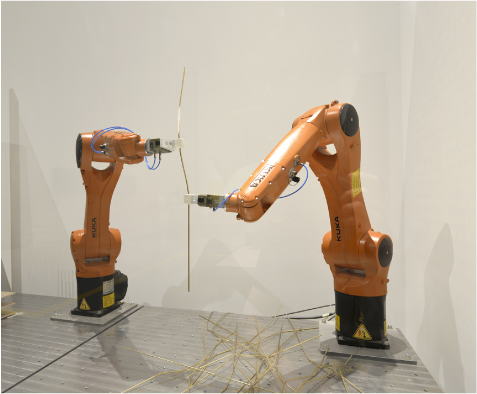
Brass Swarm is an experimental prototype developed through self-organisational algorithmic design processes and robotic fabrication. The project explores spatial self-organisation, emergent tectonics and the relationship between robotic and algorithmic behavior. A multi-agent algorithmic strategy for spatial self-organisation was developed, from which topological surfaces emerge.
CREDIT
Project Team: Roland Snooks, Cam Newnham, Ben Verzijl
Fabrication Team: Zhao Sheng, Cai Yuan Zhen, Tang Yan Chao, Chen Yu Lan, Xu Lei, Yan Lei, Zhang Wu
This manifold swarm strategy self-organises clouds of agents into coherent, continuous surfaces, and complex spatial division. These spatial agents simultaneously generate the intricate tectonics of the project. Each agent has a body that is capable of interacting and connecting to the bodies of the surrounding agents. The interaction of these agent Bodies generates intricate ornamental and structural networks.






Brass Swarm
